
本文要解决的问题:
- 雷达是什么?
- 雷达的基本功能有哪些,即雷达可以解决什么问题?
- 脉冲体制雷达的系统构成及各模块的作用?
- 雷达接收机需要两个通道 I/Q 的原因是什么?
一、雷达概述
1.1 什么是雷达?
雷达,是 Radar (Radio Detection and Ranging) 的音译,意思是 “无线电探测和测距”,它是通过无线电/电磁波的方式获取目标的存在与否以及空间位置,因此雷达也被称为 “无线电定位”。
雷达的工作原理是: 发射机向目标发射电磁波,经目标反射之后,由接收机接收,经过信号处理可获得目标至发射机的距离、(径向)速度、方位、高度等信息。
雷达的优点是: 能够全天时、全天候工作,穿透能力强,不受光照、雾云雨天气的干扰,因此雷达是非常重要的传感器。
1.2 雷达的分类
1.3 雷达的基本功能
雷达常见的应用场景有:
海陆空的监视、导航和武器制导;
警用交通雷达用于检测车辆超速;
气象雷达监视和预测某地区天气;
空中交通管制雷达用于引导飞机航线、帮助测量飞机高度和规避恶劣天气;
海上雷达用于防撞和浮标检测;
天基和机载雷达用于观测水面、冰面、森林覆盖、土地应用、污染情况;
生命体征雷达用于跌倒检测、生命体征监测和预警;
……
由此可见,雷达的主要用途可以大致分为:检测、跟踪和成像。
1.4 雷达的性能指标
考虑到雷达系统的不同功能,其特性可以用不同的指标进行描述。
对于雷达的检测功能,在单目标检测场景中,雷达的基本指标是检测概率 f D f_D fD 和虚警概率 f F A f_{FA} fFA(检测概率和虚警概率是由信号和干扰的统计特性决定的,特别是信干比 S I R SIR SIR;但对于多目标检测场景,性能指标还要考虑雷达的分辨率和旁瓣特性。
对于雷达的跟踪功能,雷达的基本指标是距离、角度、速度估计的精度。
对于雷达的成像功能,雷达的基本指标是空间分辨率和动态范围。
二、脉冲体制雷达
2.1 系统构成及作用
一种简单的脉冲单基雷达大致由波形发生器、发射机、天线、接收机、信号处理器、数据处理器组成。
波形产生器用于产生需要的脉冲波形;
发射机的作用是调制、放大,并发送出去,发射机调制的目的是把原始信号调制到射频( R F RF RF);
天线用于接收回波信号,并通过双工器进入接收机;
双工器是用于控制发射还是接收切换的收发开关;
接收机对回波信号进行了放大、解调,将调制信号调制到较低的中频和最终的基带上,基带信号上是没有调制任何载波的,基带信号会被送入信号处理器;
信号处理器完成信号处理功能,比如脉冲压缩、匹配滤波、多普勒滤波、积累和运动补偿等;
信号处理器的输出被送入最终的数据处理器和显示器。
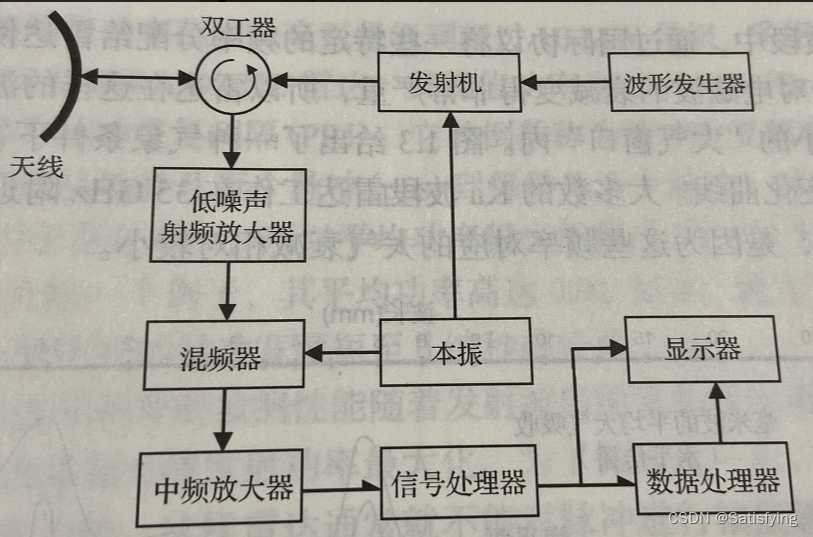

图1. 某种脉冲单机雷达的组成框图
2.2 雷达接收机
雷达信号通常是窄带、带通、相位或频率调制的函数,这意味着单个散射体的回波波形 r ( t ) r(t) r(t) 具有以下形式:
r ( t ) = A ( t ) s i n ( Ω t + θ ( t ) ) r(t)=A(t)sin(\Omega t+\theta(t)) r(t)=A(t)sin(Ωt+θ(t))其中,幅度调制 A ( t ) A(t) A(t) 表示脉冲的包络。接收机的主要功能是将雷达信号中承载信息的部分变换到基带,目的是测量 θ ( t ) \theta(t) θ(t)。
下图是经典雷达接收机的一种常规设计:
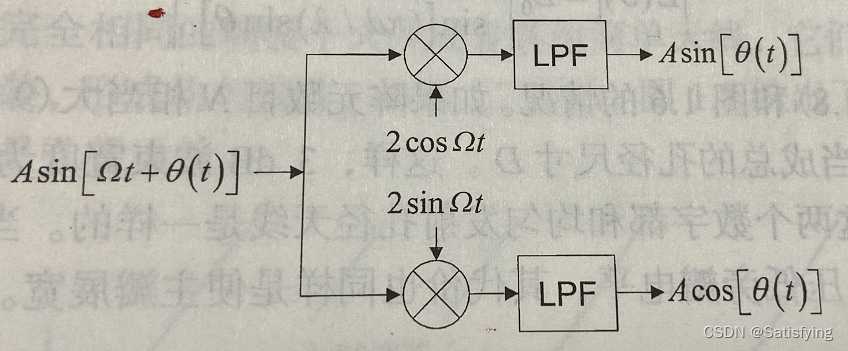

图2. 经典正交通道接收机结构(下通道是 I 通道,上通道是 Q 通道)
接收到的信号被分到两个通道,其中一个通道称为接收机的同相通道或 “I” 通道(上图中的下支路),同相通道中接收信号和振荡器的信号进行混频,该振荡器称为 “本地振荡器(本振)”,其频率和雷达频率相同。根据积化和差公式,混频之后产生了和频和差频两个频率分量,即:
2 s i n ( Ω ( t ) ) A ( t ) s i n [ Ω ( t ) + θ ( t ) ] = A ( t ) c o s [ θ ( t ) ] − A ( t ) c o s [ 2 Ω ( t ) + θ ( t ) ] 2sin(\Omega(t))A(t)sin[\Omega(t)+\theta(t)]=A(t)cos[\theta(t)]-A(t)cos[2\Omega(t)+\theta(t)] 2sin(Ω(t))A(t)sin[Ω(t)+θ(t)]=A(t)cos[θ(t)]−A(t)cos[2Ω(t)+θ(t)] “I” 通道接收信号混频之后经过低通滤波器 (LPF),和频分量被滤除,仅仅留下调制项 A ( t ) c o s [ θ ( t ) ] A(t)cos[\theta(t)] A(t)cos[θ(t)]。
另外一个通道被称为正交通道,或 “Q” 通道,在该通道中,接收信号也和本振信号进行混频,但在混频前本振信号要移向 90°,则 Q 通道的混频输出为:
2 c o s ( Ω ( t ) ) A ( t ) s i n [ Ω ( t ) + θ ( t ) ] = A ( t ) s i n [ θ ( t ) ] + A ( t ) s i n [ 2 Ω ( t ) + θ ( t ) ] 2cos(\Omega(t))A(t)sin[\Omega(t)+\theta(t)]=A(t)sin[\theta(t)]+A(t)sin[2\Omega(t)+\theta(t)] 2cos(Ω(t))A(t)sin[Ω(t)+θ(t)]=A(t)sin[θ(t)]+A(t)sin[2Ω(t)+θ(t)] “Q” 通道接收信号混频之后也经过低通滤波器,和频分量被滤除,仅留下调制项 A ( t ) s i n [ θ ( t ) ] A(t)sin[\theta(t)] A(t)sin[θ(t)] 。
实际应用中,信号处理通常会将 I 通道的信号当成实部,Q 通道的信号当成虚部,形成一个复信号,即:
x ( t ) = I ( t ) + j Q ( t ) = e j θ ( t ) x(t)=I(t)+jQ(t)=e^{j\theta(t)} x(t)=I(t)+jQ(t)=ejθ(t)心得:
1)同相通道的混频信号是本振载波信号,测量得到的是相位调制项 θ ( t ) \theta(t) θ(t) 的余弦值;
2)正交通道的混频信号是正交载波信号,测量得到的是相位调制项 θ ( t ) \theta(t) θ(t) 的正弦值。
三、Key Points
3.1 为什么雷达接收机同时需要 I/Q 两个通道?
答: I/Q 这两个通道任何一个都不能单独提供足够的信息确认唯一的相位调制项 θ ( t ) \theta(t) θ(t), 因此要想无模糊地确定相位调制 θ ( t ) \theta(t) θ(t),雷达接收机同时需要 I/Q 两个通道。
解释: 如下图,同相通道测量得到的仅仅是 A ( t ) c o s [ θ ( t ) ] A(t)cos[\theta(t)] A(t)cos[θ(t)],同一个 c o s [ θ ( t ) ] cos[\theta(t)] cos[θ(t)] 值对应两个 θ ( t ) \theta(t) θ(t),正交通道测量得到的是 A ( t ) s i n [ θ ( t ) ] A(t)sin[\theta(t)] A(t)sin[θ(t)],同一个 s i n [ θ ( t ) ] sin[\theta(t)] sin[θ(t)] 值对应也两个 θ ( t ) \theta(t) θ(t),所以任何一个单独的通道都无法完全确定 θ ( t ) \theta(t) θ(t) 值,但两个通道的测量信息可以确定唯一的 θ ( t ) \theta(t) θ(t) 值。
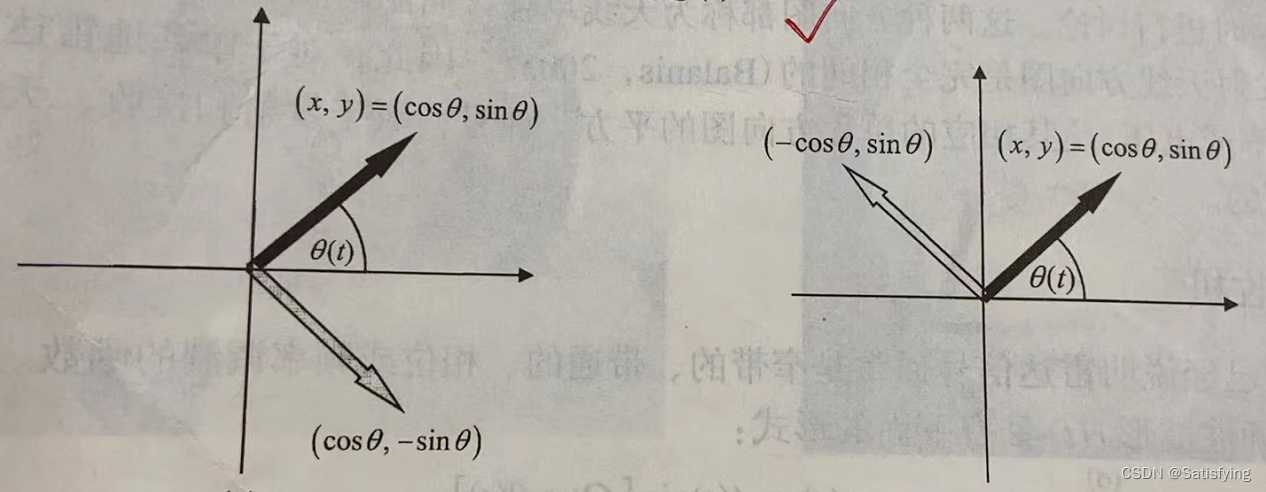
图3. I/Q 通道分别计算相位调制项的 余弦/正弦
3.2 高质量接收机设计的要求
1)本振信号频率和发射机频率必须完全一致;
2)I/Q 两个通道在信号的带宽范围内必须具有完全相同的传递函数;
3)用于解调 I/Q 通道信号的振荡器信号必须完全正交,即它们的相位必须相差 90°。
 支付宝扫一扫
支付宝扫一扫 微信扫一扫
微信扫一扫









最新评论